Etna
Helpful & Friendly User

- Zuletzt hier
- 22.06.25
- Registriert
- 13.01.11
- Beiträge
- 2.214
- Kekse
- 29.937
Moin!
Nicht lang schnacken, erst mal zwei Bilder vom guten Stück:


Man kann gut erkennen, dass das Gehäuse mal ein Big Muff Pi gewesen ist. Dieser rostete in meiner Werkstatt munter vor sich hin und hatte eh keine Funktion mehr. Für den Zustand war ich allerdings nicht verantwortlich, da man mir den so bereits vermacht hat. Da dachte ich mir, kann ich das gute Stück retten, indem ich ihn mit einem Raspberry Pi B+ wieder zum Leben erwecke. Dies ist auch der Grund, weshalb sich bei meinem DIY Mics nichts mehr getan hat. Ich brauchte ein Studienprojekt und da habe ich mir das hier ausgedacht, damit ich hinterher auch einen Nutzen vom ganzen Aufwand habe.
Der Lack ist einfach Hammerite in blau und sieht recht okay aus. Ich habe mit viel Arbeit das Blech mit einer Messingbürste als Akkuschrauberaufsatz wieder vom Rost befreit. Danach musste es unbedingt sowas sein, sonst hätte man alles mögliche an Spuren von dieser Arbeit durch den Lack hindurch gesehen. Das Blau passt auch recht gut zum Display. Das untere Blech war zum Glück nicht so stark angegriffen. Das hat nur eine kurze Reinigung und 4 neue Gummifüße aufgeklebt bekommen. Ich mag diesen Kunstlederüberzug sehr. Schade, dass dieser auf der Unterseite sein Dasein fristet.
Gedacht ist der Raspberry Pi als Multieffekt. Die Effekte sind über das Netzwerkkabel frei programmierbar. Hierbei habe ich mich meiner Studentenlizenz von Matlab / Simulink bedient, um den Pi zu konfigurieren, programmieren und die Effekte einzubinden. Das war aufwendiger als Gedacht. Ins besondere die Ansteuerung des Displays war nicht so trivial wie erhofft.
Apropos Display, die Anbindung sieht wie folgt aus:

Bei den Potis handelt es sich um Drehimpulsgeber, die die reine Drehbewegung weiter geben. Den ganz rechten Knopf kann man zudem als Taster verwenden. Er dient dem Speichern des eingestellten Werts. Das Problem bei "digitalen Potis" ist ja, dass man sich die Einstellungen merken muss, damit man nicht alle eingegebenen Parameter erneut einstellen muss, ehe man losrockt. Darauf hat denke ich mal niemand wirklich Lust.
Zu beachten ist, dass die Potis keine Beschriftung haben. Die Beschriftung und auch der Wert sind in der ersten Zeile des Displays angezeigt. So kann man alle einstellbaren Parameter stets frei wählen. Man muss nur jedes mal das Display umkonfigurieren, um dies zu erreichen. Mit dieser Lösung war ich freier was die Paramtervergabe anbelangt. In der unteren Zeile steht klar der Effektname. Man will ja manchmal auch ohne zu hören wissen, was gerade aktiv ist.
Bisher wurden nur drei Effekte Programmiert. Es sind ein Delay, ein Faser und Distortion am Start. Aber die Effekte an sich sind sehr einfach in Simulink erstellbar. Das aufwändige an der Arbeit war eindeutig das Grundkonzept und den Weg dahin bis zur Basis der Effekte. An eigentliche Effekte habe ich nur zum Schluss gedacht.
Die Anschlüsse sehen wie folgt aus:

Von Links nach Rechts sind das: Output, Lan, Power und Input.
Hier der Schaltplan:
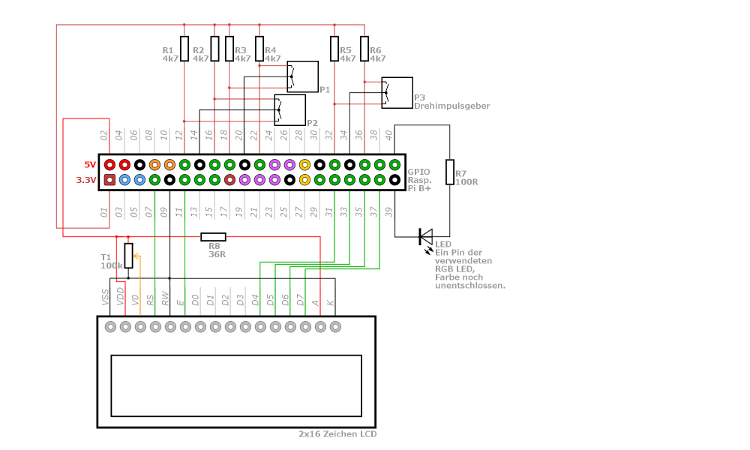
Dieser Schaltplan ist alles andere als Komplett. Er zeigt nur den Anschluss der LED, dem Display und der drei Drehimpulsgeber. Die Taster fehlen komplett, sowie die Soundkarte, der Netzwerkanschluss und noch so manch anderes. Aber die Schaltung musste ich als Ansatz für meinen Bericht anfertigen. Als er dann lief, wurde es obsolet und ich war bis Dato einfach zu faul das noch zu erweitern. Aber Taster über die GPIO-Ports anzubinden ist sehr einfach. Wer das nachmachen möchte, einfach ein Widerstand nehmen und dann als Drop Down verlöten. Easy!
Hier mal ein paar Bilder vom Inneren:
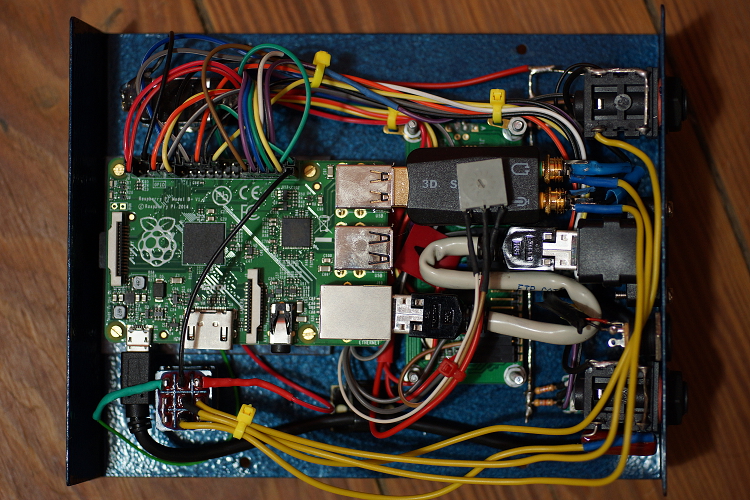
Das Bild wirkt für den Anfang recht wust und ist mit vielen Kabeln recht durcheinander. Aber ich versuche es mal ein wenig zu erklären. Ich hoffe die Folgenden Detailansichten veranschaulichen das Innenleben dann noch einmal.
Oben Links sieht man die vielen Bunten Anschlusskabel, die zum Header der GPIOs des Pi führen. Unter den Kabeln ist ein Fußtaster verbaut, der den Wechsel der Effekte ermöglicht.
In der Mitte Links sieht man den Pi. Unter dem Pi findet man die RGB-LED die an zwei Anoden im Wechsel über den Fußschalter betrieben wird.
Der Pi B+ hat den Vorteil von 4 statt früherer 2 Bohrungen. Leider sind die Bohrlöcher vom 3,3mm auf 2,8mm geschrumpft. Daher ist er nur für M2,5 ausgelegt. Leider fand ich auf die Schnelle keinen Gewindeschneider in der Größe. Da musste ich dann zwecks hübscher Befestigung eine kleine Acrylplatte ausschneiden, die von der LED-Fassung getragen wird. Aufgrund der Passgenauigkeit konnte sich die Platte auch nicht mehr verdrehen. So sind dann M2 Gewinde in alle 4 Ecken gekommen und zum Glück sind die Köpfe der Schrauben groß genug gewesen den Pi zu halten. Zwischen dem Pi und der Acrylplatte sind noch Abstandhalter, damit er auch die richtige Höhe hat.
Die Entscheidung für den B+ sind nur dem neuen Formfaktor und der Mehrzahl an GPIO-Ports geschuldet. Da er das gleiche gekostet hat wie der normale Pi, war das kein Argument.
Links Unten sieht man den Fußschalter, der sowohl einen True-Bypass ermöglicht, als auch an der LED kenntlich zeigt, ob der Effekt eingeschliffen ist oder nicht. Links neben dem Fußschalter ist ein USB-Stecker, dessen anderes Ende an der Buchse für die Stromversorgung sorgt. Die 4 gelben Kabel vom Schalter aus sind die Audio-Kabel.
Rechts neben dem Pi in der Mitte sieht man die kleine USB-Soundkarte, auf der ein Poti klebt. Dieses Poti stellt die Helligkeit des Displays ein. Man kann stattdessen auch einfach irgendwelche Widerstände einlöten. Unter der Soundkarte versteckt sich das Display, dessen Schrauben auch so gut wie möglich die Kabel ein wenig feststrapsen ließen. Unter der Soundkarte ist das LAN-Kabel zu einer LAN-Buchse geführt, um den Pi auch ohne angeschlossenes Display oder Tastatur bedienen und programmieren zu können.
Was bei der Soundkarte unbedingt zu beachten ist, dass diese keine LED hat. Solche Soundkarten gibt es zwischen 2 und 20 Euro und funktionieren quasi alle gleich. Allerdings hatte ich bei den ersten beiden das Problem, dass der Treiber unter Linux sagt: "Hey, klasse das du funktionierst! Aber, damit es jeder weiß, sollst du permanent blinken." Optisch stört das Geblinke nicht, aber man hört es leider. Bei dem Kabelsalat induziert sich das bis in den Amp. Da hat selbst das Abknipsen der LED und Abschirmen mit Alu-Folie nicht geholfen, um es aus der Welt zu schaffen. Darum musste ich mir auch 5 Soundkarten kaufen, ehe ich eine fand, bei der das Phänomen nicht mehr auftritt.
Ganz Rechts ist das Anschluss- oder Bedienfeld. Da sieht man alle Buchsen und deren Verdrahtung. Darunter befinden sich die Drehimpulsgeber.
Bei den Anschlüssen bin ich in folgende Fallen getappt: Der AC97 Standart sollte beachtet werden. Das bedeutet, dass an der Soundkarte 5V Gleichspannung am Eingang anliegen. Diese verursacht an der Gitarre lautes Rumpeln bei Poti-Bewegung. Daher habe ich mit einem großen Folienkondensator den Gleichspannungsanteil mal weg genommen. Zudem sollten unbedingt Stereo-Stecker in der Soundkarte vorhanden sein. Die verweigert sonst den Dienst, wenn Kontakte gebrückt werden. Sie geht zwar nicht kaputt, aber es ist ebenso doof, wenn kein Ton mehr raus kommt. Zudem ist unbedingt bei der Polung der Stromversorgung auf die Farbcodierung des USB-Kabels zu achten. Der Pi ist da recht zimperlich, was die Versorgung angeht.
Hier nochmal ein paar Impressionen des Innenraums en Detail:
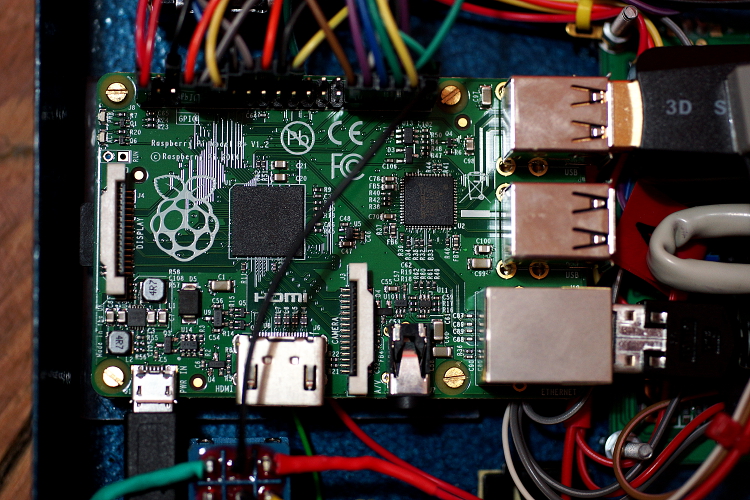
Das ist der Pi nochmal nah.
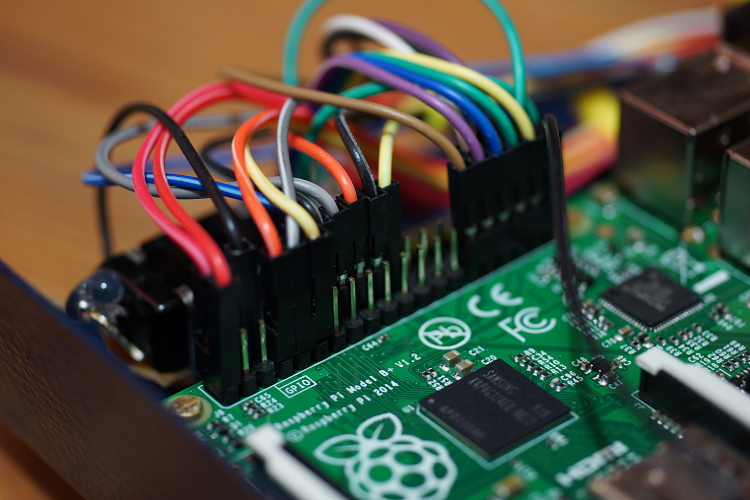
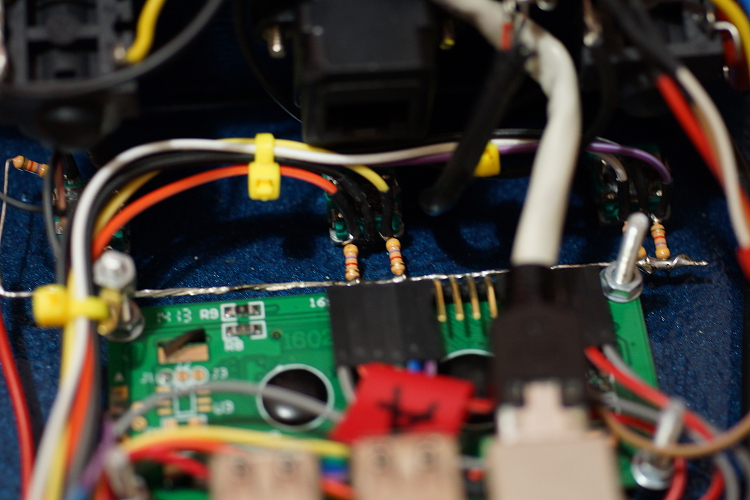
Hier habe ich den Header mit den nötigen Anschlussleitungen nochmal.
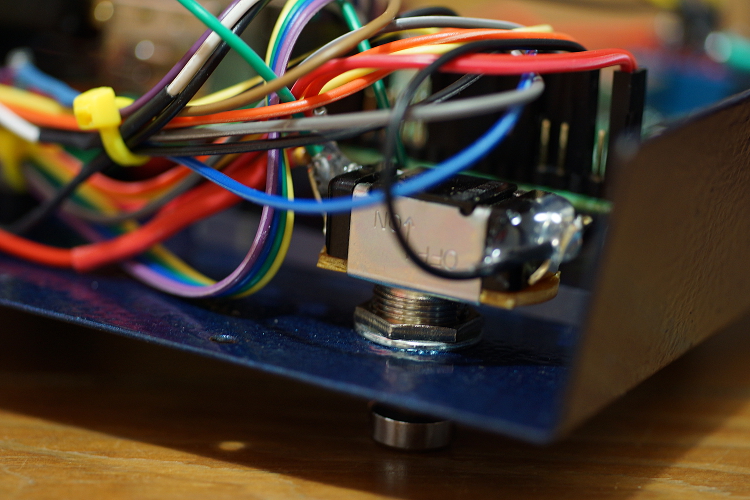
Hier sieht man den Fußtaster. Dessen Kontakte musste ich nach dem Löten dick mit Heißkleber einpacken, weil mir die Litze immer abgerissen ist.
Airwire for the win! Die Drehimpulsgeber habe ich unter Freiluft verdrahtet. Das Gehäuse und die umliegenden Teile haben es erlaubt und somit Aufwand gespart.
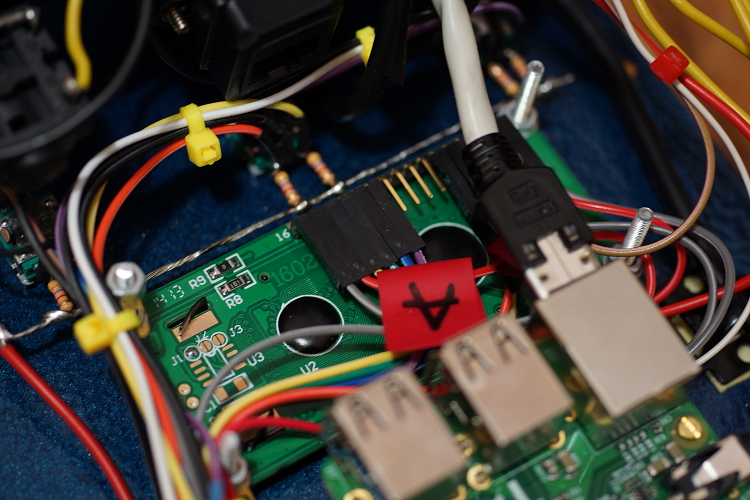
Hier sieht man das Display nochmal mit seinem Header und den angeschlossenen Kabeln.
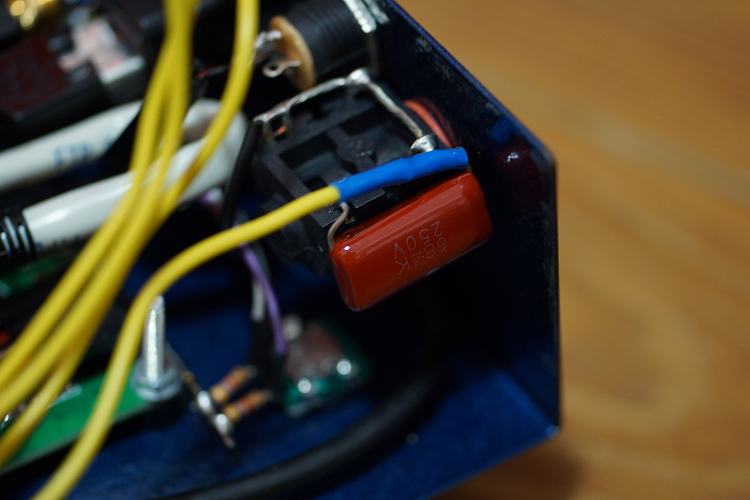
Das ist der besagte Kondensator zum Entkoppeln der Gleichspannung von der Gitarre oder davor liegenden Effekten.
Zum Sound kann ich nicht viel Sagen. Er hängt davon ab, was man erreichen möchte und wie man es programmiert. Durch die Soundkarte treten zumindest keine Hörbaren Verluste auf. Selbst, wenn die Wandler nicht von der besten Sorte gibt, macht mir eher etwas anderes Sorgen. Das ist die Latenz. Ich frage mich, wie es andere Leute bei Ihren Projekten unter Linux geschafft haben diese runter zu schrauben. Die Latenz ist nämlich nicht einstellbar und fester Bestandteil der Audio-Treiber. Die Datei der ALSA musste erst mal gefunden und dann darin der Verantwortliche Parameter gesenkt werden. Danach muss die .c Datei wieder kompiliert und auf das Image gezogen werden. Da fand viel Trial and Error statt, da es ab einem Wert nur noch Ausreisser gab und es merkbar knackte. Mitlerweile ist die Latenz erträglich gering. Aber ich sehe dieses Pedal auch eher als Versuchsobjekt zur Algorithmusfindung, als das ich das Pedal live auf der Bühne verwenden wollen würde. Dazu ist mir das Ergebnis noch nicht stabil genug.
Wenn man damit recorden mag, kann man damit auch seine eigenen speziellen Effekte verwenden, die kein Hersteller in Petto hat. Oder man verwendet standart-Algorithmen, um mal alle Effekte auszuprobieren, ehe man diese in analoger Form kauft. Usw... Da sind wirklich viele Möglichkeiten mit diesem Aufbau gegeben, die ich gar nicht aufschreiben kann.
Derzeit ist der Pi 2 auf dem Markt. Ich habe bereits zwei Exemplare davon zuhause und prüfe den auf Herz und Nieren. Leider wird er noch nicht von Matlab / Simulink unterstützt. Aber ich hoffe das kommt beim nächsten Update. Ich bin zudem gespannt, was sich mit dem kleinen Teil unter Windows 10 anstellen lässt. Das Projekt liegt damit quasi erst in den Kinderschuhen. Vielleicht packe ich den Pi auch bald in ein Rack, damit es sich leichter dran arbeiten lässt. Zum Austausch der SD-Karte muss ich ihn immer komplett demontieren und das nervt auf Dauer, wenn man herum spielt und einem dabei ein Fehler unterläuft. Aber es war interessant ein so kompaktes Multieffekt zu bauen. Normalerweise sind sie doch meist größer.
Puh, das war wieder viel Text. Für Anregungen, Kritik und Fragen bin ich wie immer offen.
Gruß,
Etna
Nicht lang schnacken, erst mal zwei Bilder vom guten Stück:
Man kann gut erkennen, dass das Gehäuse mal ein Big Muff Pi gewesen ist. Dieser rostete in meiner Werkstatt munter vor sich hin und hatte eh keine Funktion mehr. Für den Zustand war ich allerdings nicht verantwortlich, da man mir den so bereits vermacht hat. Da dachte ich mir, kann ich das gute Stück retten, indem ich ihn mit einem Raspberry Pi B+ wieder zum Leben erwecke. Dies ist auch der Grund, weshalb sich bei meinem DIY Mics nichts mehr getan hat. Ich brauchte ein Studienprojekt und da habe ich mir das hier ausgedacht, damit ich hinterher auch einen Nutzen vom ganzen Aufwand habe.
Der Lack ist einfach Hammerite in blau und sieht recht okay aus. Ich habe mit viel Arbeit das Blech mit einer Messingbürste als Akkuschrauberaufsatz wieder vom Rost befreit. Danach musste es unbedingt sowas sein, sonst hätte man alles mögliche an Spuren von dieser Arbeit durch den Lack hindurch gesehen. Das Blau passt auch recht gut zum Display. Das untere Blech war zum Glück nicht so stark angegriffen. Das hat nur eine kurze Reinigung und 4 neue Gummifüße aufgeklebt bekommen. Ich mag diesen Kunstlederüberzug sehr. Schade, dass dieser auf der Unterseite sein Dasein fristet.
Gedacht ist der Raspberry Pi als Multieffekt. Die Effekte sind über das Netzwerkkabel frei programmierbar. Hierbei habe ich mich meiner Studentenlizenz von Matlab / Simulink bedient, um den Pi zu konfigurieren, programmieren und die Effekte einzubinden. Das war aufwendiger als Gedacht. Ins besondere die Ansteuerung des Displays war nicht so trivial wie erhofft.
Apropos Display, die Anbindung sieht wie folgt aus:
Bei den Potis handelt es sich um Drehimpulsgeber, die die reine Drehbewegung weiter geben. Den ganz rechten Knopf kann man zudem als Taster verwenden. Er dient dem Speichern des eingestellten Werts. Das Problem bei "digitalen Potis" ist ja, dass man sich die Einstellungen merken muss, damit man nicht alle eingegebenen Parameter erneut einstellen muss, ehe man losrockt. Darauf hat denke ich mal niemand wirklich Lust.
Zu beachten ist, dass die Potis keine Beschriftung haben. Die Beschriftung und auch der Wert sind in der ersten Zeile des Displays angezeigt. So kann man alle einstellbaren Parameter stets frei wählen. Man muss nur jedes mal das Display umkonfigurieren, um dies zu erreichen. Mit dieser Lösung war ich freier was die Paramtervergabe anbelangt. In der unteren Zeile steht klar der Effektname. Man will ja manchmal auch ohne zu hören wissen, was gerade aktiv ist.
Bisher wurden nur drei Effekte Programmiert. Es sind ein Delay, ein Faser und Distortion am Start. Aber die Effekte an sich sind sehr einfach in Simulink erstellbar. Das aufwändige an der Arbeit war eindeutig das Grundkonzept und den Weg dahin bis zur Basis der Effekte. An eigentliche Effekte habe ich nur zum Schluss gedacht.
Die Anschlüsse sehen wie folgt aus:
Von Links nach Rechts sind das: Output, Lan, Power und Input.
Hier der Schaltplan:
Dieser Schaltplan ist alles andere als Komplett. Er zeigt nur den Anschluss der LED, dem Display und der drei Drehimpulsgeber. Die Taster fehlen komplett, sowie die Soundkarte, der Netzwerkanschluss und noch so manch anderes. Aber die Schaltung musste ich als Ansatz für meinen Bericht anfertigen. Als er dann lief, wurde es obsolet und ich war bis Dato einfach zu faul das noch zu erweitern. Aber Taster über die GPIO-Ports anzubinden ist sehr einfach. Wer das nachmachen möchte, einfach ein Widerstand nehmen und dann als Drop Down verlöten. Easy!
Hier mal ein paar Bilder vom Inneren:
Das Bild wirkt für den Anfang recht wust und ist mit vielen Kabeln recht durcheinander. Aber ich versuche es mal ein wenig zu erklären. Ich hoffe die Folgenden Detailansichten veranschaulichen das Innenleben dann noch einmal.
Oben Links sieht man die vielen Bunten Anschlusskabel, die zum Header der GPIOs des Pi führen. Unter den Kabeln ist ein Fußtaster verbaut, der den Wechsel der Effekte ermöglicht.
In der Mitte Links sieht man den Pi. Unter dem Pi findet man die RGB-LED die an zwei Anoden im Wechsel über den Fußschalter betrieben wird.
Der Pi B+ hat den Vorteil von 4 statt früherer 2 Bohrungen. Leider sind die Bohrlöcher vom 3,3mm auf 2,8mm geschrumpft. Daher ist er nur für M2,5 ausgelegt. Leider fand ich auf die Schnelle keinen Gewindeschneider in der Größe. Da musste ich dann zwecks hübscher Befestigung eine kleine Acrylplatte ausschneiden, die von der LED-Fassung getragen wird. Aufgrund der Passgenauigkeit konnte sich die Platte auch nicht mehr verdrehen. So sind dann M2 Gewinde in alle 4 Ecken gekommen und zum Glück sind die Köpfe der Schrauben groß genug gewesen den Pi zu halten. Zwischen dem Pi und der Acrylplatte sind noch Abstandhalter, damit er auch die richtige Höhe hat.
Die Entscheidung für den B+ sind nur dem neuen Formfaktor und der Mehrzahl an GPIO-Ports geschuldet. Da er das gleiche gekostet hat wie der normale Pi, war das kein Argument.
Links Unten sieht man den Fußschalter, der sowohl einen True-Bypass ermöglicht, als auch an der LED kenntlich zeigt, ob der Effekt eingeschliffen ist oder nicht. Links neben dem Fußschalter ist ein USB-Stecker, dessen anderes Ende an der Buchse für die Stromversorgung sorgt. Die 4 gelben Kabel vom Schalter aus sind die Audio-Kabel.
Rechts neben dem Pi in der Mitte sieht man die kleine USB-Soundkarte, auf der ein Poti klebt. Dieses Poti stellt die Helligkeit des Displays ein. Man kann stattdessen auch einfach irgendwelche Widerstände einlöten. Unter der Soundkarte versteckt sich das Display, dessen Schrauben auch so gut wie möglich die Kabel ein wenig feststrapsen ließen. Unter der Soundkarte ist das LAN-Kabel zu einer LAN-Buchse geführt, um den Pi auch ohne angeschlossenes Display oder Tastatur bedienen und programmieren zu können.
Was bei der Soundkarte unbedingt zu beachten ist, dass diese keine LED hat. Solche Soundkarten gibt es zwischen 2 und 20 Euro und funktionieren quasi alle gleich. Allerdings hatte ich bei den ersten beiden das Problem, dass der Treiber unter Linux sagt: "Hey, klasse das du funktionierst! Aber, damit es jeder weiß, sollst du permanent blinken." Optisch stört das Geblinke nicht, aber man hört es leider. Bei dem Kabelsalat induziert sich das bis in den Amp. Da hat selbst das Abknipsen der LED und Abschirmen mit Alu-Folie nicht geholfen, um es aus der Welt zu schaffen. Darum musste ich mir auch 5 Soundkarten kaufen, ehe ich eine fand, bei der das Phänomen nicht mehr auftritt.
Ganz Rechts ist das Anschluss- oder Bedienfeld. Da sieht man alle Buchsen und deren Verdrahtung. Darunter befinden sich die Drehimpulsgeber.
Bei den Anschlüssen bin ich in folgende Fallen getappt: Der AC97 Standart sollte beachtet werden. Das bedeutet, dass an der Soundkarte 5V Gleichspannung am Eingang anliegen. Diese verursacht an der Gitarre lautes Rumpeln bei Poti-Bewegung. Daher habe ich mit einem großen Folienkondensator den Gleichspannungsanteil mal weg genommen. Zudem sollten unbedingt Stereo-Stecker in der Soundkarte vorhanden sein. Die verweigert sonst den Dienst, wenn Kontakte gebrückt werden. Sie geht zwar nicht kaputt, aber es ist ebenso doof, wenn kein Ton mehr raus kommt. Zudem ist unbedingt bei der Polung der Stromversorgung auf die Farbcodierung des USB-Kabels zu achten. Der Pi ist da recht zimperlich, was die Versorgung angeht.
Hier nochmal ein paar Impressionen des Innenraums en Detail:
Das ist der Pi nochmal nah.
Hier habe ich den Header mit den nötigen Anschlussleitungen nochmal.
Hier sieht man den Fußtaster. Dessen Kontakte musste ich nach dem Löten dick mit Heißkleber einpacken, weil mir die Litze immer abgerissen ist.
Airwire for the win! Die Drehimpulsgeber habe ich unter Freiluft verdrahtet. Das Gehäuse und die umliegenden Teile haben es erlaubt und somit Aufwand gespart.
Hier sieht man das Display nochmal mit seinem Header und den angeschlossenen Kabeln.
Das ist der besagte Kondensator zum Entkoppeln der Gleichspannung von der Gitarre oder davor liegenden Effekten.
Zum Sound kann ich nicht viel Sagen. Er hängt davon ab, was man erreichen möchte und wie man es programmiert. Durch die Soundkarte treten zumindest keine Hörbaren Verluste auf. Selbst, wenn die Wandler nicht von der besten Sorte gibt, macht mir eher etwas anderes Sorgen. Das ist die Latenz. Ich frage mich, wie es andere Leute bei Ihren Projekten unter Linux geschafft haben diese runter zu schrauben. Die Latenz ist nämlich nicht einstellbar und fester Bestandteil der Audio-Treiber. Die Datei der ALSA musste erst mal gefunden und dann darin der Verantwortliche Parameter gesenkt werden. Danach muss die .c Datei wieder kompiliert und auf das Image gezogen werden. Da fand viel Trial and Error statt, da es ab einem Wert nur noch Ausreisser gab und es merkbar knackte. Mitlerweile ist die Latenz erträglich gering. Aber ich sehe dieses Pedal auch eher als Versuchsobjekt zur Algorithmusfindung, als das ich das Pedal live auf der Bühne verwenden wollen würde. Dazu ist mir das Ergebnis noch nicht stabil genug.
Wenn man damit recorden mag, kann man damit auch seine eigenen speziellen Effekte verwenden, die kein Hersteller in Petto hat. Oder man verwendet standart-Algorithmen, um mal alle Effekte auszuprobieren, ehe man diese in analoger Form kauft. Usw... Da sind wirklich viele Möglichkeiten mit diesem Aufbau gegeben, die ich gar nicht aufschreiben kann.
Derzeit ist der Pi 2 auf dem Markt. Ich habe bereits zwei Exemplare davon zuhause und prüfe den auf Herz und Nieren. Leider wird er noch nicht von Matlab / Simulink unterstützt. Aber ich hoffe das kommt beim nächsten Update. Ich bin zudem gespannt, was sich mit dem kleinen Teil unter Windows 10 anstellen lässt. Das Projekt liegt damit quasi erst in den Kinderschuhen. Vielleicht packe ich den Pi auch bald in ein Rack, damit es sich leichter dran arbeiten lässt. Zum Austausch der SD-Karte muss ich ihn immer komplett demontieren und das nervt auf Dauer, wenn man herum spielt und einem dabei ein Fehler unterläuft. Aber es war interessant ein so kompaktes Multieffekt zu bauen. Normalerweise sind sie doch meist größer.
Puh, das war wieder viel Text. Für Anregungen, Kritik und Fragen bin ich wie immer offen.
Gruß,
Etna
- Eigenschaft

 .
.")
 .
. .
.